جلسه دفاع پایان نامه: محمد رحمانی، گروه طراحی کاریردی
خلاصه خبر:
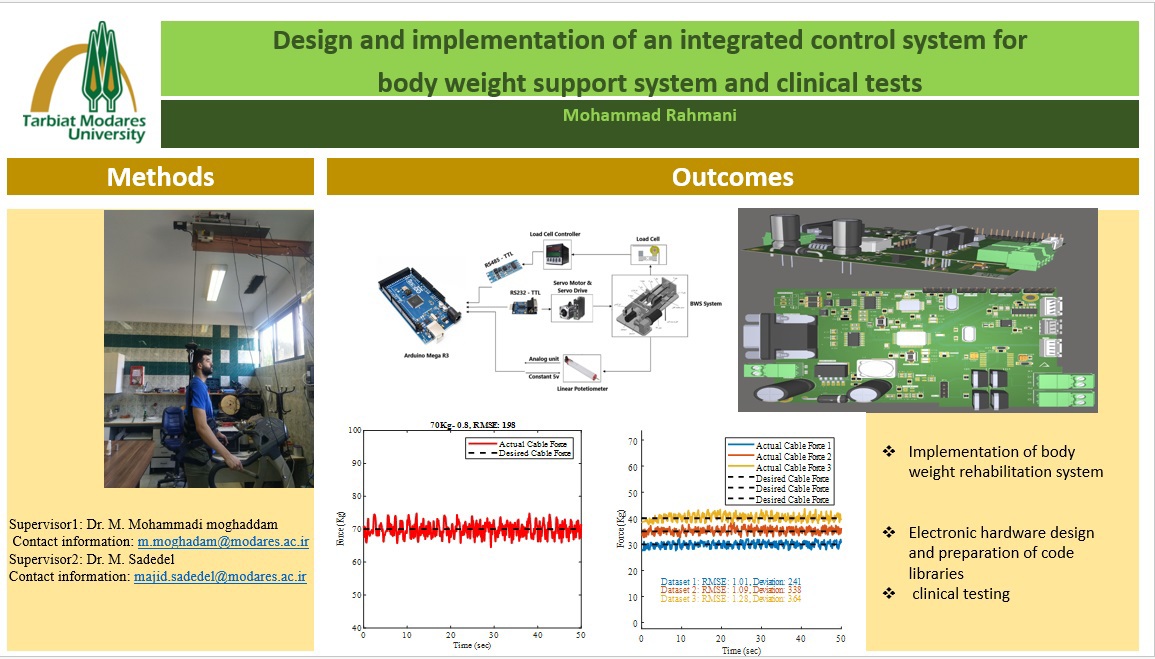
موضوع پایان نامه: طراحی و پیادهسازی سیستم کنترل یکپارچه برای سامانه تعلیق وزن بدن و انجام تستهای بالینی
ارائهکننده: محمد رحمانی استاد راهنما اول: دکتر مجید محمدی مقدم استاد راهنما دوم: دکتر مجید سادهدل استاد ناظر داخلی: دکتر سجاد ازگلی استاد ناظر خارج از دانشگاه: دکتر محمد نجفی آشتیانی تاریخ: 1403/06/19 ساعت: 16 مکان: دانشکده فنی و مهندسی، بلوک 3، طبقه همکف، آزمایشگاه مکاترونیک
چکیده: اختلال در توانایی حرکتی دست و پا یکی از شایع ترین اختلالاتی است که به دلایل مختلفی از جمله آسیب نخاعی، سکته مغزی و آسیب های ورزشی در انسان رخ میدهد. با افزایش سالمندی و افزایش جمعیت سالمندان جهان، احتمال افزایش بیماران سکته مغزی زیاد خواهد شد که این امر باعث افزایش تعداد بیماران مبتلا به اختلالات حرکتی میشود. توانبخشی و برقراری مجدد توانایی راه رفتن برای افرادی که توانایی حرکتی خورد را از دست دادهاند، یکی از مهمترین اهداف امروزه توانبخشی میباشد. در این پژوهش به بررسی مکانیزم تعلیق وزن بدن ساخته شده در آزمایشگاه مکاترونیک تربیت مدرس پرداخته شده است. این مکانیزم قابلیت پیادهسازی در سه پیکربندی متفاوت را دارد که در هر سه این پیکربندیها عملگر سری الاستیک به عنوان بخش فعال سیستم عمل میکند. پیکربندی اول و دوم سیستم دارای دو عدد فنر کششی به عنوان بخش نیمه فعال بوده و نسبت به پیکربندی سوم که بدون فنر کششی است دارای مزیت باربرداری دو برابری میباشد. تستهای عملکردی سیستم فقط در حالت مونتاژی سوم سیستم انجام شده است. در این پایان نامه، هدف بررسی و پیادهسازی دو حالت دیگر مونتاژ مکانیزم و هم چنین پیاده سازی کنترل کننده توکار برای هر سه حالت مونتاژ سیستم میباشد. در ابتدا بخش الکترونیکی سیستم که وظیفه کنترل پارامترهای کنترلی را دارد طراحی و سپس با تایید عملکرد قسمت الکترونیک برد PCB آن نیز طراحی شد. به کمک برد طراحی شده، مکانیزم مونتاژی در حالت اولیه تست شد. این پیکربندی دارای قابلیت باربرداری دینامیکی تا 100 کیلوگرم خواهد بود. برای این حالت تستها در دو سرعت متفاوت 8/0 و 6/1 کیلومتر بر ساعت و باربرداری 25 تا 75 کیلوگرم انجام گرفت. خطای دنبالهروی در کلیهی باربرداریها در حدود 4 درصد اندازهگیری شد. مونتاژ پیکربندی دوم نیز انجام اما با توجه به کورس کم سیستم در این پیکربندی، تستهای عملی برای این حالت انجام نشد. در مرحله بعد حالت سوم مونتاژ سیستم مجددا پیادهسازی شده و با سه کنترلر جدید تستهای بالینی انجام شد. کنترل با فیدبک نیرو، فیدبک موقعیت و فیدبک همزمان نیرو و موقعیت نتایج تقریبا یکسانی داشت و نمودارها و نتایج دنبالهروی نیروی کابل از مقدار تعیین شده را به خوبی نشان میدهد. در باربرداری 40 کیلوگرم و سرعت 6/1 کیلومتر بر ساعت، خطای دنبالهروی برای کنترلر با فیدبک موقعیت 45/1 کیلوگرم، کنترلر با فیدبک نیرو 69/1 کیلوگرم و هم چنین برای کنترلر با فیدبک همزمان نیرو و موقعیت خطا برابر 58/1 کیلوگرم میباشد. به طور کلی درصد خطا برای سیستم در حدود 4 درصد وزن برداشته شده است که برای یک سیستم آزمایشگاهی بسیار عالی خواهد بود.